Já não é de hoje que digo isso), o HelenOS é o sistema operacional micro-kernel que mais gosto.
Já o mencionei em vários vídeos no canal e artigos aqui no blog (basta digitar "toca do tux" +HelenOS no Google que encontrará boa parte)
e por alguns motivos básicos:
Funcionar bem mesmo dentro das limitações que existem no conceito micro-kernel
Ser uma fonte rica de estudo sobre sistema operacional assim como o Linux
Bom, por mais que essa pareça uma noticia um tanto quanto sem graça para muitos, é até interessante e um progresso tratando-se de um sistema operacional micro-kernel onde o seu desenvolvimento é bem mais complexo (isso vale para todos os sistemas operacionais micro-kernel, até mesmo para o Fuschia). Desta vez a equipe do HelenOS apresentou no HelenOS Meeting o port do seu próprio emulador NES chamado ZX Spectrum.
No vídeo abaixo, apresentam o LaiNES rodando no HelenOS:
A equipe HelenOS começa a ter sua gama de software disponível bem crescente e pretendem torná-los fáceis de encontrar e instalar via um pkg. Há também planos para portar jogos do Linux para o HelenOS como descrevem no próprio site.
E olhem que coisa interessante. Essa semana a startup BedRock mandou mensagem a toda a equipe do HelenOS procurando engenheiros de micro-kernel para um projeto.
É sempre bom estar esperto para ver o que acontece no futuro, não é? ;)
Desta vez estamos vendo o HelenOS tendo suporte a Raspberry Pi e ao DOSBox. Parece estranho alguém querer rodar alguma aplicação no DOSBox, mas como Jiri Svoboda descreve em seu blog:
"Isso pode soar estranho, mas o DOSBox é um emulador de máquina completo (CPU + periféricos) e *além* de um emulador DOS. "
"Mas por que alguém iria querer rodar o HelenOS no DOSBox eu escuto você perguntando. Bom, além de ser muito legal, DOSBox consegue emular alguns hardwares que o Qemu não, tais quais algumas placas de vídeo e de áudio antigas, MIDI e etc."
Está aí um motivo interessante e que é valido como carta na manga até mesmo para nós (ou até mesmo como material de estudo. Por que não?). Já outro usuário postou um vídeo exibindo o HelenOS rodando em um Raspberry Pi e o vídeo pode ser conferido logo abaixo:
Martin Decky também postou um commit para utilizar char32_t ao invés de wchat_t para representar strings UTF-32. De acordo com Martin, o novo tipo char32_t é obviamente uma opção muito mais adequada. Compatibilidades com o padrão C é mantido e muita revisão já está sendo feito pela comunidade.
Quer saber mais sobre o HelenOS? Além de vários artigos aqui no blog, há um vídeo especial no meu canal esclarecendo como o sistema operacional é.
Foi anunciando no dia 17 de Dezembro o lançamento do sistema operacional micro-kernel HelenOS que recebeu o codinome Vsevolod V. Volkov de Kiev Ukrania, o autor do Volkov Commander.
Esse lançamento trás suporte a arquitetura AArch64 (para computadores single-board HiKey960); um novo gerenciador de arquivos baseado em painel chamado Navigator e trás também melhorias nas partes de interface de usuários (além de novos elementos), no modo texto, no editor de texto (além de portado para libui), no desempenho do suporte ao Raspberry Pi.
HarmonyOS - O sistema operacional que visa substituir o Android
Martin Děcký, um dos autores do sistema operacional HelenOS e que trabalha para a Huawei em um sistema operacional que pretende ser o substituto completo do Android. Em Junho de 2021, Martin concedeu uma entrevista para o site Checo lupa.cz dando uma visão sobre o sistema operacional HongMeng OS e sua relação com o HarmonyOS.
Martin Děcký, um dos autores do sistema operacional HelenOS e do HongMeng OS.
HongMeng OS é um sistema operacional com seu próprio microkernel que não tem nada a ver com Linux ou base de código de qualquer outro sistema e que teve seu inicio de desenvolvimento em 2017. Ele tem várias iterações internas e uma terceira transcrição está sendo trabalhada. Martin começou a trabalhar na certificação de segurança deste sistema e alguns de seus colegas começaram a trabalhar em um hipervisor.
Para mim e para a maioria dos meus colegas, o HelenOS foi um projeto que nos moldou em termos de conhecimento e de orientação geral de nossas carreiras. É uma parte fundamental da minha vida profissional. É por isso que lamento que o HelenOS esteja atualmente em uma fase lenta e estou dedicando muito mais tempo e energia a outros sistemas de microkernel.
Por volta de 2018, o nome do sistema foi alterado para HarmonyOS para melhor adoção no mercado ocidental e a empresa anunciou publicamente que o objetivo era que o HongMeng OS / HarmonyOS era substituir o Android nos smartphones da empresa e ao mesmo tempo ser utilizado em seus navegadores, roteadores, BTS e muito mais. estranhamente depois a empresa decidiu comunicar o sistema sob o nome HarmonyOS e que não tem nada a ver com o HongMeng OS original. HarmonyOS 1.0 é um sistema construído sob o núcleo LiteOS em tempo real enquanto a versão 2.0 do HarmonyOS 2.0 é basicamente Linux mais parte de código aberto do Android mais add-ons internos da empresa.
LiteOS
O HongMeng OS ainda está evoluindo e há um plano de que ele será o substituto definitivo para o Android.
"Um sistema operacional multiservidor de microkernel é composto de pequenos componentes isolados, cada um executando em um espaço de endereço separado e assim por diante. Esta é uma arquitetura adequada para verificação formal, certificação ou execução em situações de segurança e missão crítica . A sobrecarga associada à comunicação de componentes isolados anda de mãos dadas com isso. Existem cenários, como um smartphone, em que os componentes são um pouco mais monolíticos. Arquitetura flexível significa ter um mecanismo que pode modificar um sistema de componentes e sua arquitetura de modo que durante a implantação seja possível juntar componentes do espaço do usuário e movê-los de lá para o kernel e assim por diante."
"Há algum tempo, tem havido um esforço para pelo menos unificar os garfos internos do kernel Linux no projeto HULK, o Huawei Unified Linux Kernel, para que tenhamos uma base de código Linux unificada."
Então, já que a galera está gostando de especular muito sobre o Fuschia, aqui está mais um sistema operacional que irá concorrer com o Android.
Display server é declarado oficialmente o servidor gráfico do HelenOS
Esse dias postei a noticia de que Jiri Svoboda estava trabalhando no desenvolvimento de um novo servidor gráfico para o HelenOS que recebeu o nome de Display Server para substituir o atual que se chama Compositor. (na verdade foram quatro novidades,mas o foco aqui é exatamente o servidor gráfico).
Agora é declarado oficial que o Compositor chegou ao fim de sua vida abrindo caminho ao novo Display Server. Há ainda muito o que ser feito, mas o Display Server já recebeu os primeiros pedaços de uma nova pilha graphics/UI que já permite redimensionamento de janelas com cursor, barra de arrastar e pré-visualização do tamanho mínimo da janela (parece que não, mas o trabalho envolvendo o desenvolvimento de um servidor gráfico é longo e complexo).
O trabalho será concentrado em seu git que recebeu o nome de GFX e Jiri afirma que o próximo passo é trabalhar em uma biblioteca UI library para poderem trabalhar com a arquitetura GFX. Jiri agradece a Jakub Jermář pela revisão do código.
E a ultima novidade que gostaria de contar é que nesse processo, acabei descobrindo que Jiri utiliza a distribuição Fedora. Descobri isso quando soube que ele estava tendo problemas com incompatibilidade do Python 2 com o Python após ter atualizado para o Fedora 32 (e que melhor ambiente de desenvolvimento existe? :) Chegaram a passar esse link para o cara:
Mais novidades sobre o HelenOS (com o novo Display Server)
Há alguns dias (especificamente no dia 26 de Junho) eu postei sobre três novidades no HelenOS sendo suas delas tratam-se de rodar o sistema operacional no Raspberry Pi e no DOSBox. Um dia após este artigo, Jiri Svoboda anunciou o recurso Display Server que é o substituto para o atual compositor e o primeiro passo para uma completa revisão de sua GUI. Jiri informou que vem trabalhando há mais de um ano no Display Server e que está quase pronto para entrar no master do GitHub do HelenOS (e que pode ser conferido clicando aqui).
O Display server possui uma base de código mais estruturada e e uma arquitetura mais flexível. Isso faz com que melhorias possam ser trazidas de forma mais hábil. Jiri preparou mais informações sobre o Display Server em um slide que (e que ainda não sabe se irá ter a oportunidade de apresentar) mas que pode ser conferido clicando aqui.
Mesmo que eu venho falando (desde que lancei o canal e o blog) sobre o HelenOS e você não faz ideia do que se trata, HelenOS não se trata de uma distribuição Linux (como já divulgaram assim) e sim um sistema operacional microkernel. Esse lançamento trás suporte a novas arquiteturas de 64 bist e melhorias na usabilidade.
O possui suporte console serial para máquinas sparc64/sun4u foram melhorados ao habilitá-lo no kernel; suporte a lincagem dinâmica nas arquiteturas amd64, arm32, ppc32 e sparc64 (em adição ao suporte anterior a ia32); suporte a MIPS Malta foi melhorado ao habilitar a entrada e saída de console seria no kernel e também para a interface de usuários; adicionado suporte a arm64 (AArch64 o port pode rodas no QEMU).
Você analisa externa e internamente um sistema operacional e quase chegando a conclusão de que é uma distribuição Linux (mesmos comandos, mesmo sistema de arquivos, estrutura de diretórios parecidas e até mesmo bootloader). Até que se depara com outro ponto... Não se trata de Linux... Mas como assim? Fica aqui uma questão para analisarmos. Bora para o arrebento:
Depois que postei o artigo Emulador de NES no HelenOS,o pessoal vem me pedindo para falar sobre o sistema operacional e aqui resolvi em explicar sobre o sistema operacional micro-kernel e até mesmo como o conheci. O interessante foi me contarem que há canal de Linux que afirma com se trata de uma distribuição Linux.
A palavra inglesa kernel (pronuncia-se em inglês kârnl e seu plural é kernels) tem o sentido de semente, grão, núcleo entre outros.
Quando começamos a imergir no mundo Linux, acabamos conhecendo a sua relação histórica com o sistema operacional Minix. Se você conhece a história, sabe que o Linux nasceu na comunidade Minix; os e-mails trocados foram feitos na comp.os.minix; de certa forma, o Linus teve sua inspiração em decepções com o Minix, patches escritos para o Minix (e que nunca foram utilizados no Minix) foram portados para o Linux, e a primeira comunidade Linux foi composta de usuários de Minix.
E no meio disso tudo, acabamos descobrindo que do kernel Linux é monolítico enquanto que o kernel do Minix é microkernel. Daí surge a pergunta "que raio é isso de kernel monolítico e microkernel?". E pesquisando, acabamos descobrindo que o assunto é mais longo do que imaginamos e vamos então aqui destrinchar o assunto.
Um sistema operacional é composto de um conjunto de software; cada item construído para um propósito especifico. Dividindo o sistema em partes e sem entrar em detalhes, temos o kernel, drivers, bibliotecas do sistema, ferramentas do sistema e as ferramentes de desenvolvimento. Todas as demais ferramentas que utilizamos no dia a dia são construídas com base nessas. Mas aqui vamos analisar somente o kernel, o núcleo do sistema operacional.
O kernel possui quatro responsabilidades básicas; gerenciamento de comunicações entre dispositivos e software, gerenciamento de memória, gerenciamento de processador e manipular as chamadas do sistema (e gerencia os recursos do sistema).
Como o kernel atua em seu sistema operacional.
Dentro do área kernel, não existe um único tipo, podendo ser divido em quatro modelos diferentes que são: Kernel monolítico, microkernel, nanokernel e exokernel. Vamos analisar cada um destes modelos (ou ao menos, alguns deles).
Kernel monolítico
Também por vezes sendo chamado de monobloco ou kernel estático, é o modelo que a maioria dos seus recursos são executados pelo próprio kernel como demonstrado na imagem abaixo.
(17/04/2022) Trata-se do modelo que possui drivers e outros itens do kernel que se localizam fora do kernel e que podem ser carregados e descarregados de forma modular (daí o termo kernel modular). Vale reforçar que módulos também são drivers, a diferença é que localizam-se fora do kernel. reforço isso pois há um mito no mundo Linux de que driver é um termo do Windows enquanto que no Linux o termo empregado é módulo. Isso não é verdade; o termo é driver é empregado tanto no Linux quanto em qualquer sistema operacional. A diferença é aonde o driver se localiza, se dentro ou fora do kernel.
Essa foi a melhor imagem ilustrando o kernel modular que encontrei na internet já que não sou bom para desenhos. Caso você seja bom desenhista e quiser me mandar a sua arte, eu agradeço pela sua contribuição uma vez que esse é um dos meus artigos mais acessados.
Muitos afirmam que o kernel Linux é monolítico, e isso não é necessariamente verdade como também não é necessariamente mentira. Até mais ou menos 1995, o kernel Linux era realmente monolítico, até que nessa época introduziram o recurso Loadable Kernel Modules (LKMs) que permite ao Linux a flexibilidade de ser tanto monolítico (drivers dentro do kernel) quanto modular.
Kernel monolítivo vs kernel modular
Ambos os modelos possuem vantagens e desvantagens. O kernel monolítico possui a vantagem de proporcionar melhor desempenho e melhor segurança ao sistema devido seus recursos e driver residirem dentro do próprio kernel (built-in); porém, esses recursos e drivers estarão sempre em execução mesmo quando não forem necessários consumindo recurso do hardware o tempo todo. Isso em um desktop hoje em dia, onde possuímos facilmente abundancia de processadores com muitos núcleos, ao menos 8 Gigabytes de RAM, placas mãe com altos barramentos e boas placas de vídeo, pode não parecer incomodo; mas em servidores que permanecem em funcionamento 24/7/365 e atendendo a altas demandas, remover o que não é necessários, sempre é uma boa prática a ser mantida (imagine em ambientes embarcados).
Verificando a quanto tempo o computador com o comando uptime
O modular, desde que seus módulos são des/carregáveis dinamicamente (LKM: Loadable Kernel Modules), proporciona a vantagem de executar somente o que e quando for necessário. Isso mantem o kernel mais enxuto e faz com que mantenha os recursos computacionais o mais livre possível caso não haja necessidade de utilizá-los. É possível carregar e descarregar os módulos manualmente execução através do comando modprob:
Removendo (descarregando) três módulos do sistema
É possível listar os módulos carregados com o comando lsmod
A desvantagem dos drivers modulares é que podem apresentar menor desempenho se comparado ao monolítico (mesmo não de forma drástica) devido o kernel ter que requisitar os drivers externamente (estando dentro do kernel, a ação é mais rápida, o óbvio). O segundo ponto considerado desvantagem é a parte de segurança; o modular pode apresentar vulnerabilidade desde que ataques podem (talvez) ser explorados e realizados através de seus módulos. Os módulos podem se tornar alvos passiveis de ataques uma vez estando fora do kernel.
Algo parecido com o kernel monolítico e o modular e que podemos usar como exemplo para fixar o entendimento são as bibliotecas. Bibliotecas podem ser divididas em dois tipos: Bibliotecas estáticas e dinamicamente.
Bibliotecas dinâmicas são dependências de um programa que são carregados quando o programa é executado e são utilizadas enquanto o programa estiver em execução ou enquanto outro for a dependência de outro programa.
Exibindo as informações do comando speedt com o comando file
Já bibliotecas estáticas são programas que não dependem de nenhuma biblioteca externa uma vez que as bibliotecas residem no próprio programa (assim como o kernel monolítico).
Exibindo as informações do programa papyrus através dos comandos file e ldd. E possível notar que trata-se de um programa estaticamente linkado (bibliotecas residem dentro do próprio programa)
Determinamos quais recursos serão incluídos no dentro do kernel Linux ou modularizados durante o processo de configuração antes de compilá-lo e instalá-lo.
Informações de escolha do kernel na parte superior do painel de configuração do kernel
Microkernel (micro-núcleo em português) ou Client-Server, ou (também) modular
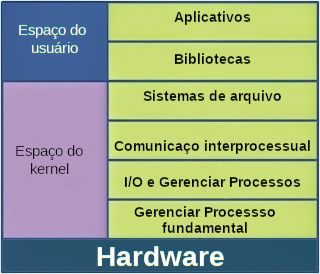
O conceito de microkernel surgiu na década de 80 visando substituir o kernel monolítico. Em seu design totalmente diferente do kernel monolítico, o microkernel trabalha com o mínimo de recursos possíveis (como o próprio nome sugere) carregando somente o que é necessário para o funcionamento do sistema operacional. Todos os demais recursos são distribuídos e administrados em forma de serviços totalmente isolados no user space; esses serviços são chamados daemons ou servidores. Tratam-se de programas que ficam em execução em plano de fundo e cada um sendo responsável por ser administrador de uma única tarefa específica que anteriormente era administrada pelo próprio kernel.
Nota: o Termo kernel modular também pode ser empregado para o micrkernel porém, para o microkernel, o termo é empregado para suas daemons enquanto que para o Linux é empregado para drivers externos conforme já mencionado.
(visão geral de um microkernel)
A ideia por trás do seu modelo é proporcionar maior segurança ao sistema operacional. Caso ocorra alguma pane em um dos serviços, todo o resto do sistema operacional permanece intacto não afetando nenhum dos outros serviços. O próprio serviço afetado é restaurado pela Daemon que o administra ou até por outra daemon sem a necessidade de intervenção humana, sem perturbar todos os outros serviços em execução e, principalmente, sem que o usuário perceba.
A outra vantagem estaria em seu código. Pelo fato desse kernel ser extremamente pequeno e trabalhar com modularizarão, acabaria se tornando mais fácil de receber manutenção do que o kernel monolítico.
Exemplo de sistemas operacionais microkernel
Minix quase todos nós o conhecemos já que a história do Linux está vinculada a do Minix. O Minix inicialmente era voltado a didática (Linus mesmo afirma na página 87 do Livro “Só por prazer” que Andrew o truncou de propósito, de forma ruim para que estudantes pudessem descobrir os erros por conta própria), mas com o tempo, o professor Andrew Tanenbaum e sua equipe o estenderam para outras áreas.
Mach kernel: É um microkernel que surgiu na universidade Carnegie Mellon que é utilizado pela Apple como base do MacOSX. Ocorre que se trata do mesmo microkernel utilizado pelo projeto GNU para o desenvolvimento do Hurd que na verdade seu nome é GNU Mach e não hurd; hurd é o nome do seu conjunto de daemons. O projeto GNU pediu autorização para utilizar o Mach kernel para construir seu sistema operacional como algo superior ao Unix. Esse não é o primeiro kernel adotado pelo GNU, já houve no passado uma tentativa de utilizar o kernel do sistema operacional TRIX e há planos de migração ou para algum kernel BSD ou para o L4. O sistema operacional GNU (com microkernel GNU Mach) ainda não está pronto para uso em ambiente de produção e nem há previsão de lançamento de uma versão estável.
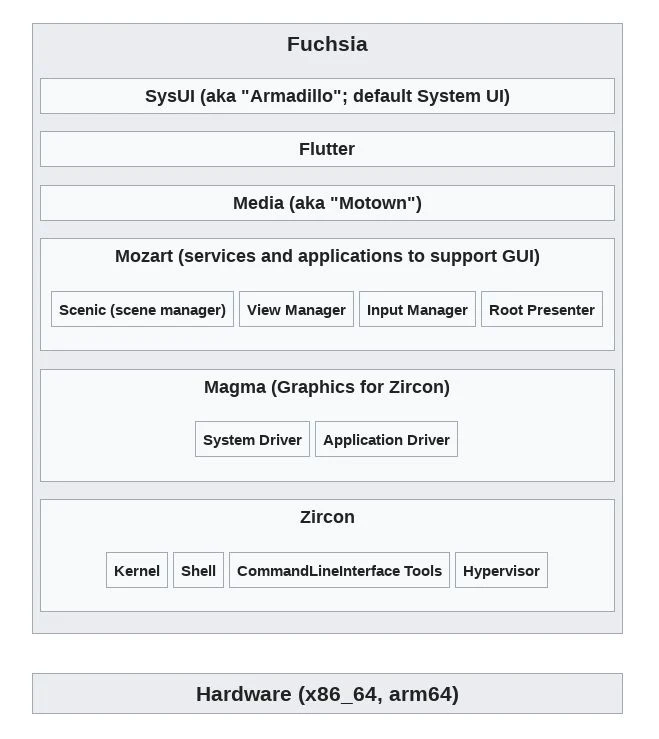
Fucshiaé um micrkernel que está sendo desenvolvido pelo Google, mas não indicam para qual propósito. Esse microkernel é encontrado no processo de boot do Android e na sua parte de segurança:
HelenOS Dentre o sistemas operacionais microkernel, este é o que eu mais gosto. Surgiu na universidade da Charles, localizada em Praga, capital da Republica Tcheca (na mesma cidade onde o Evangelista Jan Hus da Dinamarca foi queimado vivo pela igreja católica). Baseado no microkernel SPARTAN escrito por Jakub Jermář, é um sistema operacional POSIX-similar projetado do zero, de código aberto, multiservidores (daemons que separam e isolam tarefas no user space como: Naming service, VFS, file system drivers, Location service, device drivers, network layers, graphics stack layers, etc) e desenvolvido para propósito geral. É utilizado como uma plataforma para aprendizado escolar no curso de sistemas operacionais, como hobby, mas também visam mais duas áreas que pretendem ocupar que seriam criar um sistema operacional totalmente utilizável em algumas tarefas do dia a dia (como servidor, PDA ou desktop) e a outra seria se divertir. Ele não é um UNIX-like como pode ser lido clicando aqui.Eu gosto da ideia da comunidade não ter desavença com a comunidade Linux; tanto é que estudam Linux para assim implementarem seus recursos (o HelenOS possui Grub, initrd, Ext4 e caracteristicas do systemd e que vale nota de que são todos feitos do zero).
Linux VS HelenOS? NÃO! Linux E HelenOS.
L4 É um microkernel escrito do zero, foi criado visando a melhoria de desempenho dos sistemas microkernel. Existem alguns sistemas baseados nesse microkernel; até mesmo um port do Linux para a API do L4 µ-kernel, chamado L4Linux. Existem também algumas implementações desse microkernel, o Code Zero (https://github.com/jserv/codezero) foi o primeiro que eu conheci dessa família.
MonaOS é um sistema operacional livre que possui micro kernel pequeno (kernel do tamando de 132KB), novo e rápido; escrito em C++. O sistema não é nem POSIX nem um clone Windows. Está sob a licença MIT e roda em processadores Intel IA32.
mikro-SINA desenvolvido na Alemanha e descontinuado em 2004.
Muito se tem discutido quando o assunto é kernel monolítico vs microkernel. Do lado do microkernel alegam que o modelo monolítico é obsoleto, possui desvantagens de ser vulnerável, não ser portável, seu código fonte pode se tornar enorme e ter menor desempenho. Mas essas afirmações ainda são teorias; na prática, é difícil afirmar que isso e fato. Na verdade é difícil ter um sistema operacional microkernel em ambiente de produção.
Houve até mesmo uma discussão travada entre Linus e Adrew sobre o assunto. Até o Ken Tompson participou do debate afirmando que é mais fácil implementação do modelo monolítico. Linus concorda que, de um ponto de vista teórico e estético, o microkernel é melhor e o Linux perde, porém o fato de ser microkernel não é o único critério a se analisar um bom sistema. Foi discutido até mesmo na questão da portabilidade. Particularmente, eu sou mais da ideia de que, se há algo que provoque alguma pane em um dos serviços, que seja corrigido o que está provocando a pane no serviço do que outro serviço o venha a reiniciar.
Problemas e criticas a respeito do microkernel
O primeiro problema é que esse conceito ainda é apenas teórico. Dificilmente encontramos um sistema operacional microkernel sendo utilizado em ambiente de produção. Pode ser que encontramos sendo utilizado para propósitos bem específicos, porém não para propósito geral como é o caso do Linux, dos BSDs e do Windows. O segundo problema é que, ao invés de seu código ter se tonado MUITO MAIS fácil de manter como esperado, acabou foi se tornando algo EXTREMAMENTE COMPLEXO devido o seu uso de daemons como processos independentes. Adicionar um novo recurso ou corrigir um bug em um microkernel torna-se uma tarefa desgastante.É comum por exemplo não saber quando uma daemon se comunicou com a outra e dificilmente conseguem encontrar uma solução para isso.... Pegando uma ilustração do filme Transformers: A Era da Extinção quando resolvem utilizar o protótipo Galvatron(Megatron) para perseguir os Autobots. Perguntado ao operador se ele controlava a máquina, o operador respondeu: "A maior parte." e durante a perseguição, Galvatron sai de seu controle atacando a população. Basicamente isso ocorre com os sistemas microkernel, as coisas podem sair do nosso controle. Para solucionar esse problema, o sistema operacional HelenOS está implementando várias técnicas do systemd a seu init system:
E aqui surge o terceiro problema. Focaram tanto em seu conceito de processos independentes, isolamento do kernel que a parte de recursos acaba ficando deficiente. Não há como dizer que isso é algo de todos os sistemas operacionais microkernel, o mundo é muito amplo para afirmar isso, mas na época mesmo da flamewar entre Linus e Andrew, Linus destacou esse problema.
Se esse fosse o único critério para "benevolência" de um kernel, você estaria certo. O que você não menciona é que o minix não faz a coisa do micro-kernel muito bem, e possui problemas com multitarefa real (no kernel). Se eu tivesse feito um OS que tivesses problemas com um sistema de arquivos multithreading, eu não seria tão rápido em condenar os outros: De fato, eu faria o possível para que os outros se esquecessem do fiasco.
Uma critica que tenho a respeito do microkernel é... para que daemon para o sistema arquivos e daemon para memória sendo que tratam de recursos essenciais para manter o sistema operacional em funcionamento o tempo todo? No caso do sistema de arquivos por exemplo, se a intenção é reiniciar seu serviço caso ocorra uma pane, acho muito mais interessante o sistema de arquivos possuir o recurso de self-healing assim como HAMMER/2 do DragonflyBSD e o ZFS do Solaris (aqui temos dois casos no mundo real provando que isso funciona) ao invés de uma daemon ter que fazer o serviço:
HAMMER file system que fica disponível imediatamente após uma quebra. Não há necessidade de uso do fsck para repará-lo.
Tratando do tema de reiniciar o serviço no caso de ocorrer alguma pane, esse não é um recurso exclusivo dos sistemas operacionais microkernel. sistemas operacionais de kernel monolítico podem possuir essa característica. O systemd por exemplo, init system exclusiva do Linux, possui tal recurso. Conferindo a imagem abaixo, analisamos o o arquivo unit do serviço de impressão cups (sigla de Common Unix Print System). Em [Service] temos a opção Restart=on-failure. Essa opção realiza exatamente a o mesmo propósito que o microkernel se propõe a fazer....
Recurso do systemd para auto-reinicialização de serviços caso ocorra algum erro.
Quebrando o mito sobre o kernel monolítico
Aproveitando que abordei sobre unit e init system, vamos retomar a parte como o kernel monolítico funciona. Geralmente é dito pelos defensores do microkernel que o kernel monolítico é que realiza todas as tarefas; isso não é totalmente verdade. Na verdade o kernel monolítico não realiza todas as funções. Como descrito na própria LPI, apesar do sistema operacional Linux ser de kernel monolítico, muitos aspectos de baixo nível do sistema operacional são efetuados por daemons. O que é um recurso comum seguindo os princípios do design do Unix que é exatamente o emprego de processos separados para controlar funções distintas do sistema operacional.
De acordo com a especificação POSIX, o primeiro programa carregado pelo kernel após o processo de boot é chamado init. O init (ou também conhecido pelos termos init system ou daemon init) sempre recebo o PID de número 1 (um) e é inalterável. Enquanto o kernel é responsável pelo controle de recursos do sistema operacional, o init system é responsável pelo controle de todos os processos (observação: o kernel possui threads e não processos).
Através do comando pstree é possível visualizar melhor a organização dos processos em árvore e que o init system (realçado de amarelo e em negrito) sempre no topo.
A imagem abaixo ilustra muito bem como é o real funcionamento do sistema operacional de kernel monolítico; o sistema operacional é dividido entre kernel space e user space e ambos funcionam de forma isoladas um do outro. O kernel space (espaço do kernel) é o espaço reservado unicamente para o kernel; já no user space temos bibliotecas, o init system, módulos (sim, módulos que não estão no kernel são executados isolados no user space) programas:
Esquema de funcionamento do sistema operacional monolítico.
O systemd introduziu o conceito de system layer onde vários desses serviços são administrados pela camada system agregado maior isolamento:
Esquema de funcionamento do Linux com o systemd
Alguns anos atrás, quando criei a série A pior história sobre Linux que já ouvi aproveitei para quebrar um mito a respeito do kernel monolítico com mais detalhes:
Sistemas operacionais de kernel hibrido
Entre o kernel monolítico e o microkernel existe kernel híbrido que é uma junção de recursos dos dois modelos. A ideia é que se obtenha o desempenho do kernel monolítico e a segurança do microkernel. Esse termo foi cunhado por Linus torvalds que tem dito que a questão de kernel híbrido é apenas markting.
Dentre os sistemas de kernel híbrido, cito os de meu conhecimento:
Mac OSX: Esse foi o primeiro sistema kernel hibrido que conheci. Seu kernel (Darwin) é uma hibridação do microkernel Mach e do kernel monolítico FreeBSD, 4.4BSD-Lite2 e NetBSD. Antigamente seu kernel era chamado de Xinu (uma hibridação do 4.3BSD com o Mach 2.5) quando a Next, empresa que Steve jobs fundou ao ser demitido da Apple, possuía o sistema NextStep. Quando a Apple estava à beira da falência, decidiu em uma ultima tentativa, inovar comprando a Next (para obter o NextStep, já que o Mac Os stava uma m... Era mais fácil comprar um OS do que escrever outro do zero). Disso surgiu a união do Next com a interface do Mac OS.
Haiku Esse eu sei que é desenvolvido por antigos desenvolvedores do BeOs, mas a informação real de que ele é um sistema de kernel hibrido foi difícil de encontrar. Só vi treta no site do sistema e desencanei de pesquisar.
Plan9 Esse é um sistema voltados a pesquisa. Foi desenvolvido por Ken Thompson, criador do Unix e da linguagem C (na época B), Rob Pike, Dave Presotto, and Phil Winterbottom. É um sistema em que cada processo é executado em seu próprio name space mutável.
DragonflyBSD? NÃO. Esse foi considerado no livro da Wikipedia como o primeiro sistema operacional non-Mach que possui o kernel hibrido. Mas em um post no grupo oficial do sistema em uma rede social, eu encontrei a informação de que na verdade trata-se de kernel monolítico.
Informação no livro da Wikipedia
Informação nas redes sociais
O que me fez pesquisar melhor sobre o sistema e foi então que entrei em contato com Matt Dillon, criador do DragonflyBSD, que me afirmou que o Dragonfly é tão monolítico quando o kernel Linux e o kernel FreeBSD:
Resposta de Matt Dillon
O que o DragonflyBSD faz é gerar através do seu kernel, um kernel virtual que trata o processo dentro de uma vmspace. Quando o vkernel termina o processo, o kernel real destrói o vmspace com o seu processo e o vkernel.
O NTkernel (utilizado no Windows NT, 2000, XP, Vista e Windows 7) é um kernel hibrido. Francamente? Achei muito difícil encontrar as informações deste tipo sobre o Windows. Por fim só consegui alguma informação sobre o kernel NT no web site do ReactOS [se alguém tiver alguma informação, posta aí :) ]:
Um fato curioso sobre o termo kernel hibrido é que hoje ele não é aplicado somente a kernels que mesclam os modelos monolítico e microkernel. Em um documento da LPI 201, esse termo passou a ser empregado para kernel monolítico que possui recurso de modularização.
Passe o cursor para ler a tradução do ponto selecionado.
Existem também o nanokernel que é muito mais simples que o microkernel e o exokernel que, diferente dos sistemas operacionais tradicionais (tanto de kernel monolitico quanto microkernel e kernel hibrido) em que programas e bibliotecas requisitam acesso ao kernel para que possa ter acesso ao hardware, o exokernel concede acesso direto ao hardware para os programas e bibliotecas. A ideia é simples, eliminar camadas para acelerar o melhor aproveitamento de desempenho do hardware.
Dentre a família de sistemas operacionais exokernel podemos destacar os unikernel (também conhecido como library operating system) que permite gerar imagens tão pequenas (as vezes, imagens de apenas 400k) que hoje está tomando lugar na computação em nuvem como é o caso do OSv. A imagem é gerada para um propósito bem específico e com isso, há melhor aproveitamento de hardware. A ideia é bem simples; os sistemas operacionais que utilizamos atualmente já veem acompanhado com muitos de programas que se tornam desnecessários para certos serviços que realizamos e, mesmo que os eliminamos, os sistemas ainda acabam por ter uma variedade de bibliotecas desnecessárias. A ideia do unikernel é eliminar tudo o que não for desnecessário.
Ilustração do funcionamento do unikernel
E há ainda mais um modelo fora da nossa lista, que é o sistema operacional multi-kernel. Um exemplo de sistema operacional multikernel é o Barrelfish que é um sistema operacional de pesquisa e foi inicialmente financiado pela Microsoft em 2009. Hoje conta com o apoio de muitas outras empresas.
Bom, já deu para perceber que a nossa lista se estende a bem mais do que 4 ou 5 modelos kernel, mas apesar do principio básico serem 4, a partir daí começam a se estender a muitos outros modelos. O mundo dos sistemas operacionais são muito abrangentes, mas isso é uma questão de pesquisas a serem realizadas. Incentivo a todos a fazerem isso para aprofundarem seus conhecimentos.
Estou deixando alguns links para poderem acompanhar as comparações entre os sistemas:










")





 com o comando modprobe")
 em uso no sistema")











![> MINIX é um sistema baseado no microkernel. [excluído, mas não ao ponto de perder o diálogo] LINUX é um sistema no estílo monolitico. Se esse fosse o único critério para "benevolência" de um kernel, você estária certo. O que você não menciona é que o minis não faz a coisa do micro-kernel muito bem, e possui problemas com multitarefa real (no kernel). Se eu tivesse feito um OS que tivesses problemas com um sistema de arquivos multithreading, eu não seria tão rápido em condenar os outros: De fato, eu faria o possível para que os outros se esquecessem do fiasco. [Sim, eu sei que há multithreading hacks para o minix, mas elas são hacks, e bruce evans me conta que há muitas race conditions ]](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEj6if058iVn-pB1Pq391p1FyhK8FcXL4i2-jnOGjtHewGdc755htGBBSbt_z5JEgFBZ35ehDE8xWOteq41CHeqZdnXnQ7fthmQXK7rt2eTV6gs_xxPlwC6RnNxtJYmLYt4LUn5TTjJBzEk/s1600/multithread+filesystem.PNG "> MINIX é um sistema baseado no microkernel. [excluído, mas não ao ponto de perder o diálogo] LINUX é um sistema no estílo monolitico. RESPOSTA DE LLINUX: Se esse fosse o único critério para \"benevolência\" de um kernel, você estária certo. O que você não menciona é que o minis não faz a coisa do micro-kernel muito bem, e possui problemas com multitarefa real (no kernel). Se eu tivesse feito um OS que tivesses problemas com um sistema de arquivos multithreading, eu não seria tão rápido em condenar os outros: De fato, eu faria o possível para que os outros se esquecessem do fiasco. [Sim, eu sei que há multithreading hacks para o minix, mas elas são hacks, e bruce evans me conta que há muitas race conditions ]")














{kind=link}